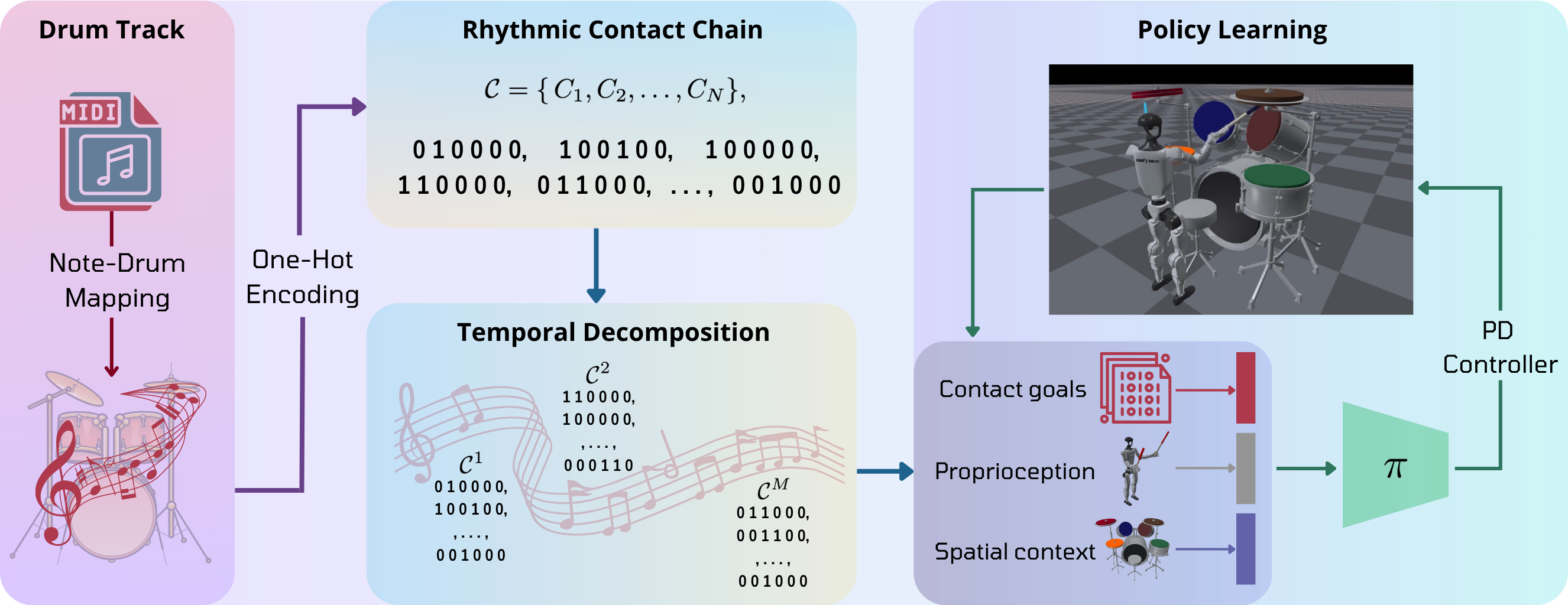
Humanoid robots have seen remarkable advances in dexterity, balance, and locomotion, yet their role in expressive domains such as music performance remains largely unexplored. Musical tasks, like drumming, present unique challenges, including split-second timing, rapid contacts, and multi-limb coordination over performances lasting minutes. In this work, we introduce Robot Drummer, a humanoid capable of expressive, high-precision drumming across a diverse repertoire of songs. We formulate humanoid drumming as sequential fulfillment of timed contacts and transform drum scores into a Rhythmic Contact Chain. To handle the long-horizon nature of musical performance, we decompose each piece into fixed-length segments and train a single policy across all segments in parallel using reinforcement learning. Through extensive experiments on over thirty popular rock, metal, and jazz tracks, our results demonstrate that Robot Drummer consistently achieves high F1 scores. The learned behaviors exhibit emergent human-like drumming strategies, such as cross-arm strikes and adaptive stick assignments, demonstrating the potential of reinforcement learning to bring humanoid robots into the domain of creative musical performance.
Performance of specialist RL policies in playing various songs.
Full performances are available on
YouTube channel
Linkin Park - In the End
The Police - Roxanne
Nirvana - Lithium
Jimi Hendrix - Fire
Eagles - Hotel California
Metallica - One
Bon Jovi - Livin' on a Prayer
Foo Fighters - Everlong
AC/DC - You Shook Me All Night Long
Nirvana - The Man Who Sold the World
Guns N' Roses - Knockin' on Heaven's Door
Nirvana - Come As You Are
The Police - Message in a Bottle
@article{shahid2025drummer,
title={Robot Drummer: Learning Rhythmic Skills for Humanoid Drumming},
author={Shahid, Asad Ali and Braghin, Francesco and Roveda Loris},
journal={arXiv preprint arXiv:2507.11498},
year={2025}
}